User Driven Prosthetic
Based on research coming out of MIT on synthetic muscle fibers and soft machines.
New opportunities are coming for advancements in prosthetics that can look and feel more human.
What if we made prosthetics more….
HUMAN.

A Different Design.
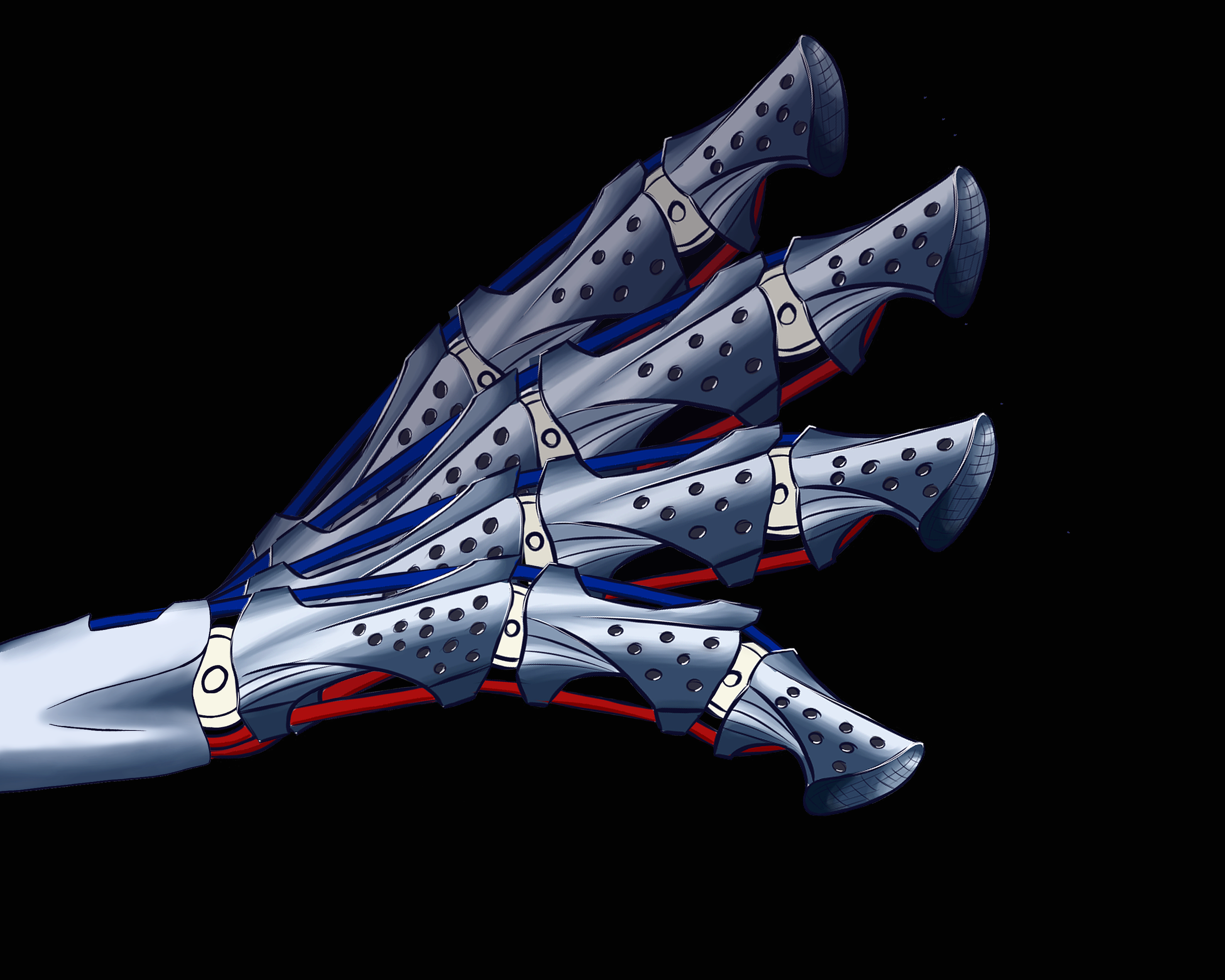
For this design I want to incorporate soft robotics into a rigid skeletal structure very similar to human anatomy. For the first prototype I focused on how to have synthetic muscle fibers sun from the forearm of a prosthetic through the wrist and into the hand.
All the parts are resin printed in standard resin giving high dimensional accuracy. I used string and elastic as a proxy for the synthetic muscle fibers and a spring for wrist rigidity.
The hand was used with permission from Fichier on Cults.com

Self-Powered Design
To keep in sync with the feeling of being close to human I wanted this design to be able to be charged but also solar powered with an internal battery. This meant making room for both the Muscle fibers and the electronics that would drive the arm.
Synthetic Muscle Fibers I am designing for are Electrofluidic Fibers which use electricity through fluid to make the muscle retract and therefore ‘flex’. They would run through the forearm and hands similar to our real muscles to give the full contraction needed for proper grip and strength.

Full Sized Model.
This full-scale model simulates the how Electrofluidic Fibers would be able to move the fingers, wrist, and forearm (Pronator Teres which rotates the forearm over). It also has room for each component inside of the forearm shell.
I used string as a proxy for the muscles which would need to retract, elastic for muscles which would serve as extenders. other Muscles such as wrist and forearm where routed through the elbow joint for further study and designing.

Next Steps
I am in the development of a new ground up prototype starting with the hands and fingers to make a simple unpinned finger knuckle design.

Continued Development
Next phase of design of reimagining and building a skeleton structure which uses minimal hardware to hold it together. I believe this will help us get closer to a human analog which can help merge soft and hard robotics and improve prosthetics for people who rely on them.
